���ں�
���ں����ܰ�ȫ���������Զ�������λ�����������Ҫ��
2023-11-30 11:53:45
- +1 ������
���켫��IT����Ƶ�������ߣ�Stefania Sesia��u-bloxȫ������Ӧ��Ӫ���ܼ�
�������Զ���ʻ�����ĵ�·�ϣ�ÿһ���³��Ĺ��ܼ��ж�������һϵ�м�ʻԱ�������ܡ����磬�˹������������Ӿ������Ľ������ƶ�ȫ�Զ�����ʻ���ݽ���Ҳ�����Զ���ʻ��5��(ADL5)��
��2030�꣬Լ70%���³������ṩ�������ֺͳ���������ܡ�����и߶��г������в��ֳ��;߱���Щ��2��(ADL2)�����Զ���ʻ���ܡ�����ʮ��ĩ���г�����չ���ڳɱ��ϵ͵�ϸ���г����ṩ���ߵ��Զ���ʻ�������ͬʱ������ADL4/ADL5�ij��м�����(MaaS)�����г���ƷҲ����ȫ������г��֡�����ʻ����ϵͳ(ADAS)���Զ���ʻϵͳ(ADS)�ɽ�����Զ��������������(�������ں�)���״�����״��Ƶ��������������ͷ�����ھ��������������йس����ܱ����������λ�õľ���Ҫ��Ϣ��
���⣬ȫ������ϵͳ(GNSS)���ջ���*�ܽ������ľ���λ�þ�ȷ������(����ȷ������)�Ĵ���������ˣ�GNSSʹ�����ܹ���ȷ���Լ��ڵ�ͼ���Լ������е�λ�á�
ADASϵͳ������GNSS��Ϣ������/����*�ѳ�����Ϊ������·�߹滮����������ͨ�ż���(5G/V2X)�����������븽���ij����ͽ�ͨ������ʩ������Щ���ݣ���ͨ����Щ����ȷ�����������ĵ�·�����Ƿ��ʺ�ʹ���ض���ʻ����(����Χ��)��ֻҪ�����������Զ���ʻ���͵�ͬ������������ʵ��λ�ã������ݶ�λ�������ߣ����п�����в���˵�����������б�Ҫȷ����Ϣ�Ŀ��Ŷ�/�����ԡ�
���Ҫ��߱�һ�������Եĸ������λϵͳ���ṩ��Ϣ����ȷ���ж���š�����ͼ��ʾ��Σ�������Ե�DZ�ڷ��տɷ�Ϊ���복����Ӳ����صĹ��ϡ��������غ���������á�����������ʹ�ò���ȫ��Ϣ�ķ���Ӧ��֤����ÿ����ʻ����10-8��10-6(һ����ʻ���ڵ���һ��Сʱ)��
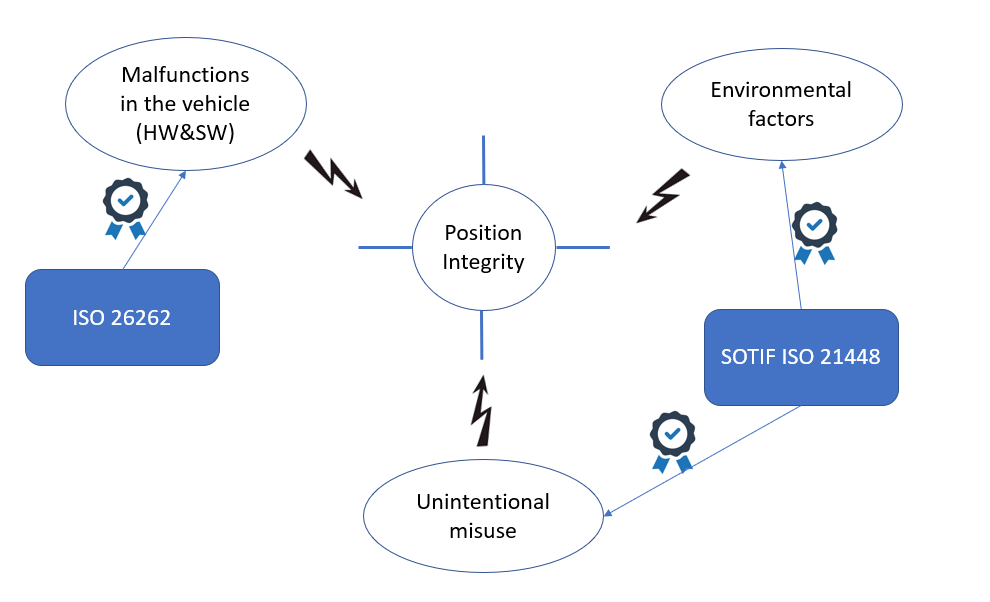
ISO 26262 - ���ܰ�ȫ��
�������Ͽ��Ļ����й����������š�����������Դ�ή�͵�·�Ĺ��ܻ���������������ȫϵͳһ��ʧ�飬���ܾͻ�������ײ�������Ա���������Ǽ���߰��ķ��ա������л�ǣ�浽���ɺ����
����ISO 26262��ר�����ڹ��ϵͳ(���Զ���ʻϵͳ)�ڹ��������µ���Ϊ�����������̱���ȷ����ϵͳ��ѭ��ȫ�����������ṩ֤��������Ӳ����ϵͳ�Կ������ϵķ��յ͵����Խ��ܵij̶ȡ�ͨ��Σ�շ�������(HARA)��ԭʼ�豸�����̻�ϵͳ�����ߣ�������ͬ��в�ʹ�����Դ��ɵ�DZ�ڷ��ա������Ҫ����һϵ��ָ���ÿ������������з��࣬��ȷ��������ȫ�����Եȼ�(ASIL�ȼ�)�����ڴ˻�����ȷ����ȫĿ�ꡣ
��ijЩ�����(�ر��Ƕ��ڸ߶��Զ����ļ�ʻ�������)���ض���ȫĿ�껹�������ӦĿ��ASIL�ȼ�(ͨ����ASIL B)��GNSS���ջ��йء�Ŀ�����趨ʵʩӲ����������Ҫ���Է�ֹ���ֹ��ϻ�Σ�ա�
Ԥ�ڹ��ܰ�ȫ��(SOTIF)
��ΪISO 26262�������ܰ�ȫ�Ա��IJ��䣬ISO 21448��������Ԥ�ڹ��ܰ�ȫ�ԣ���ϵͳ�еĵ�����/�����(E/E)Ԫ�����ⲿ������������ɵ�����ȱ�ݶ����µ�Σ�ղ����ڲ������ķ��ա�
��GNSS���ԣ��뻷�������йصķ��������ڸ��㷺��������GNSSϵͳ�����Ĺ��ϡ�������Ͽ�����������������ɵ��ش���������͵����籩�ȴ����Ŷ����������˸��ֱ���źŻ����źŵĶྶ����(���Ӿ�-NLOS)�Լ���������������(����Ի����ٴ�����)��������в��
�������� - �����Ժ���ָ��
Ϊ������������⣬����ҵ��ȥ�����Ƴ����������ȼ���(PL)������һ��ʵʱͳ�Ƽ�����ޡ����б�֤��ͳ�Ƹ�����ʾ�û�����������ȷ���������ṩ���ౣ֤ʱ��ʱ����������
PL���Ϊ������ֵ(AL)����ֵһ��ʹ�ã�ALȡ����Ӧ�á���ͼ��ʾ��˹̹��ͼչʾ��PL��AL��ʵ�����(AE)֮��Ĺ�ϵ���Լ���Ϊϵͳ�����������������ر�����ʵ��������PL��ALʱ�����δ�ܼ�������������δ�ڡ��澯ʱ�䡱֮ǰ�����澯������Ϊϵͳ����Σ�ա����Թ���(����ȫ����)״̬��������������ĸ��ʱ��뱣֤����Ŀ�������Է���(TIR)��

[˹̹��ͼ]Pr-���ʣ�PL-��������AE-ʵ��(λ��)��AL-������ֵ��TTA-�澯ʱ�䣬TIR-Ŀ�������Է���
�����Ը������Ҫ��ս֮һ�ǣ�ȷ���㹻�ϸ�ı�����������Լ����͵�Ŀ�������Է��գ�����ÿ����ʻ����10-6����͡������Ҫ���ǵ����ɸ��ʼ��͵Ĵ�����һ������о��dz���Ծ��u-blox��˾���ȿ������Ƚ���������ο�����[1-3]��ʾ��
Ϊ�˱��������Ե���Ҫ�ԣ����ǿ��Ծ�һ�����ӡ���������һ��Ӧ�ó���������ʹ��λ����Ϣ�������ض����Զ���ʻ���ܡ�����ͼ��*�����(��)�У�����λ�ñ������Ͷ�䵽����Ľֵ��ϣ�������ƽ��ֵ����PLֵ����ƽ��ֵ�����û�м�������Ҳû�з��澯�����ܻ����ؼ����ض��Զ���ʻ���ܣ������ֹ��ܲ����ʺϳ�����ǰʵ�����ڵ��ض���·���͡��ڵڶ�������(��)�У�λ�������PL��AL��Χ�ڡ�������������״̬���б�Ҫע�⣬����������У�����Ҫ��ȷ�ɿ��ĵ�ͼ��

����
Ϊ��֤������ȫϵͳ���������������˽���ڻ����е�λ�ã��Լ�����������������ľ��롣��λ��Ϊ����ֵ���ܻ���Ӱ�졢Ӳ�����Ϻ�ϵͳ�Կ������ϵ�Ӱ�졣��������ָ���ṩ��Ϣ��ȷ�ԵĿ��Ŷȡ�
GNSS���������ṩ���Զ�λ��Ϣ���Ǵ������ں�ϵͳ������ADAS/ADS�������IJ��䡣ϵͳ�ڵ�����������ʱ�����û���ʱ��Ӧ��ϵͳ��ʹ����Ӧ��Ϣ�������������ISO 26262������ȷ��������ȫϵͳ�ڹ�������µ���Ϊ���п�Ԥ���ԡ����ϲ�����ISO 21448��(SOTIF)���ȷ��ϵͳ���Ͽ������µĹ����ԡ�
δ�����и����³��䱸������ȫ���ܣ��������ţ����Ÿ߶��Զ�����ʻ��V2XӦ�ó����IJ���GNSS�Ȱ�ȫ�����������δ����������ӡ�
�ο����ף�
[1] Julien �ȣ�Extended Results of Single Epoch Position Bound (SEPB)
[2] Martini �ȣ�Galileo High Accuracy Service Performance and Anomaly Mitigation Capabilities��2023 �� 6 �� 13 �գ�PREPRINT (Version 1) of journal GPS solutions
���ͣ����








������Ѷ
������Ƶ
��Ʒ����
 X
X

 ����֤��¼
����֤��¼
 QQ�˺ŵ�¼
QQ�˺ŵ�¼
 ���˺ŵ�¼
���˺ŵ�¼