 ���ں�
���ں������Ƽ���ѧ����ʸ�����Ƶ����ͷ����������л����˵�·������
2024-07-01 14:12:43
- +1 ������
�����Ŷӣ������Ƽ���ѧ�����Ŷ�
�ؼ��ʣ��ͷ�������;·������;���ڶ�λ��֤
�����������л����������ɫ�ķ��л����Ժͽϵ͵ķ��гɱ����ŵ㣬��������졢������������չ�ֳ�������Ӧ��ǰ�����ͷ����������л������ڴ˻����ϻ����гߴ�С�������ᡢ�����Ժõ��ص㣬����խ���ռ���ҵ���������Ƹ�Ϊͻ����
Ȼ�������������л��������ڳߴ硢���غ��������������ƣ�����ֱ��Ӧ�ô�ͳ��������·�������㷨��������������л����˵�·�����ٿ������⣬�����Ƽ���ѧ�����Ŷӽ������˻�����Ч����ɫ�Ļ���ʸ�����Ƶ���·�����ٿ��Ʋ��������ͷ����������л����˵�����չ������о�������
���ƴ�����Ŷӷ������
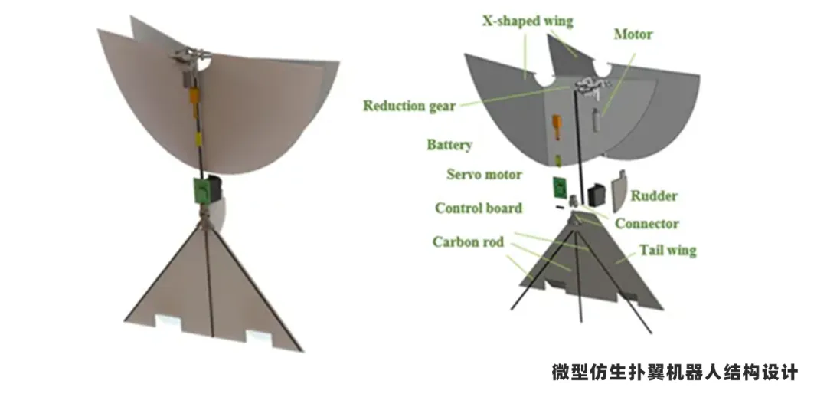
�о��Ŷ����������һ����չΪ27���ס�������Ϊ18�˵��ͷ����������л����ˣ��ܹ�ʵ�����������ɿɿط��У����߱��ȶ���ͣ������

ͼ1 �Ŷ����������ͷ����������л�����
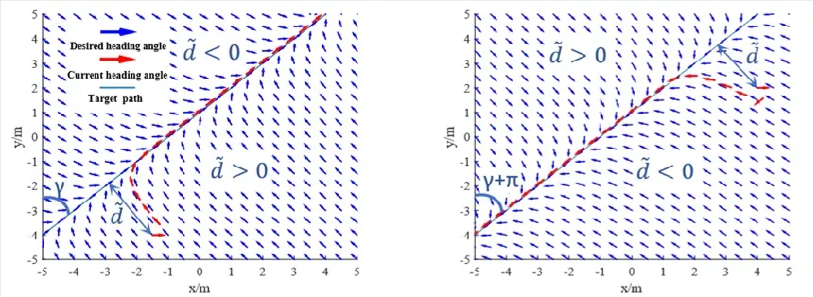
������������л����˵�ʸ����·���������⣬�Ŷӽ�����һ��Ŀ��·����ʸ�������������ֱ��·�����ٿ�������ʹ�������ڷ��й������Ÿ���λ��ʸ����������У���ȷ�ذ���Ŀ��·�����У��Ӷ�ʵ�ֶ�Ŀ��·���ĸ��١�
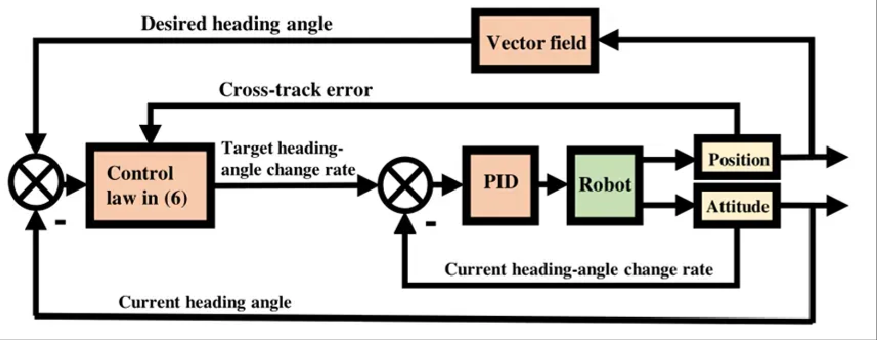
ͼ2 ֱ��·�����ٿ�����
�㷨��֤ʵ��
Ϊ����֤�㷨�Ŀ����ԣ��Ŷӽ�����MATLAB����ʵ������ڷ���ʵ�飬�õ����ͷ����������л����˵ķ��й켣�Լ���Ŀ��·���ĺ�������ʵ������
����ʵ������ʾ�������������ŵ����������£�����Ŀ��ֱ��λ���ͷ����������л����˵������Ҳ࣬����ȷ����Ŀ��ֱ�ߡ�
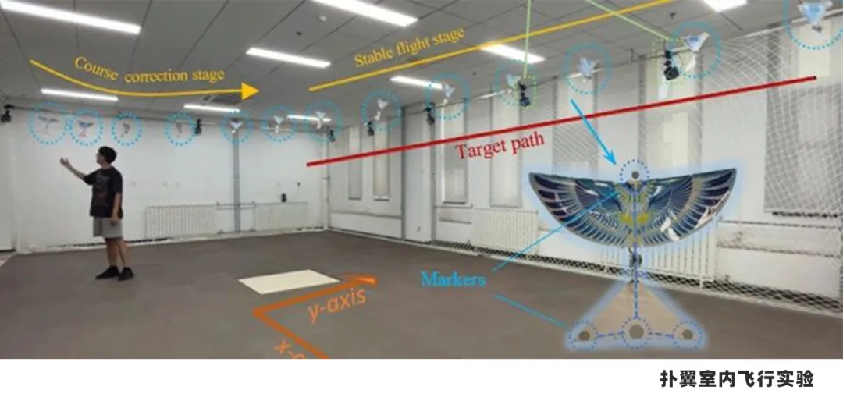
ͼ3 ����ʵ��
�����ڷ���ʵ���У��Ŷ�ͨ������Ԫ���ӽ��Ǻ����˶���ϵͳ��Ϊ���ڷ��е��ͷ����������л������ṩ�˸߾��ȡ��ǽӴ�������Ե�ʵʱλ����Ϣ�ɼ������ͨ����λ���������ݣ���ͨ��ZigBeeģ�齫�����źŴ�����ͷ����������л����ˣ���������С�
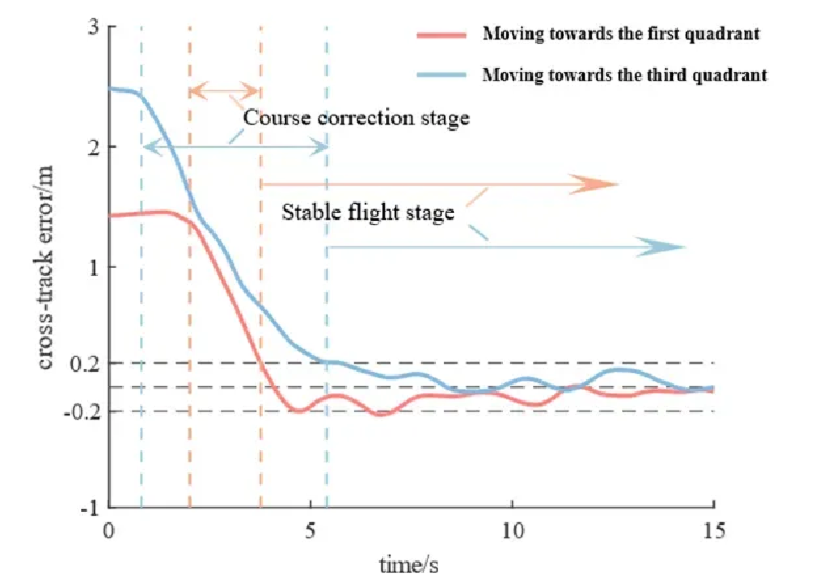
ʵ��������������Ŀ��ֱ��λ���ͷ����������л����˵������Ҳ࣬����һ��ʱ��ķ��к���Ŀ��·���ĺ������ܹ��ȶ���20cm��Χ���ڣ��ɹ�ʵ�ֶ�Ŀ��ֱ��·���ĸ��١�
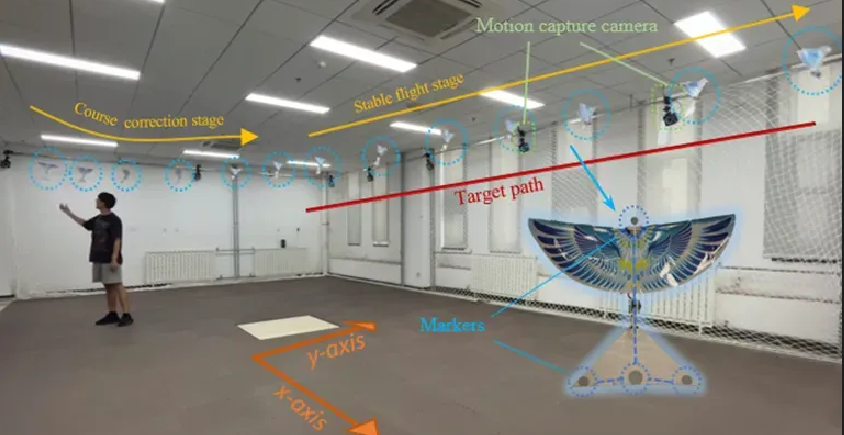
ͼ4 ���ڷ���ʵ��
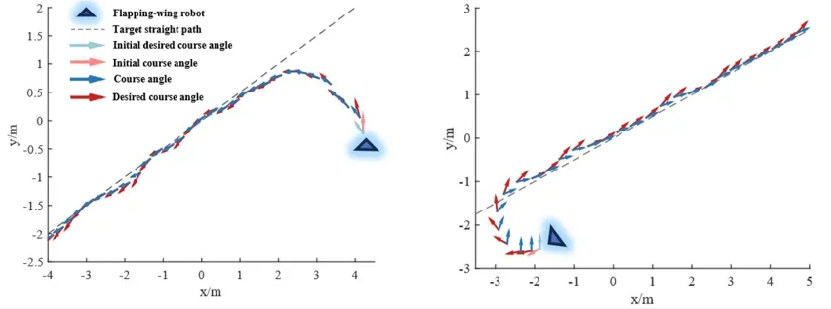
ͼ5 �ͷ����������л����˷���·��
ͼ6 �������
���ڡ�Ԫ���ӽ硹
Ԫ���ӽ������ƹ�������ȫ���ӹ�˾����Ҫ����Ԫ����������ʵ��Web3.0ʱ�������ˡ�����ý�塢ȫϢͨ�š������ѧ�����Ӧ�ã����γɹⳡ��ģ���˶�����ȫ������XR ��������ڵIJ�Ʒ���֡�
FZMotion��ѧ�˶���ϵͳ��Ԫ���ӽ������������˶����ɼ������ϵͳ������ʵʱ���ٲ�������¼��ά�ռ��ڵ�Ĺ켣��������˶���̬�Լ����嶯�����ռ䶨λ���ȿ��Դﵽ�Ǻ�����

FZMotion����ϵͳ�����˻����ڶ�λ�������������˶��滮����е��ʾ��ѧϰ������̨λ����֤��ˮ���˶���������õ��㷺Ӧ�ã�Ŀǰ�Ѿ����廪��ѧ���й���ѧ������ѧ���������պ����ѧ������������ѧ����������ҵ��ѧ�ȸ�У��չ���������ƹ⡤Ԫ���ӽ�������Ϊ��У�ṩ�걸�Ľ���������������з�չ��
�ο����ף�
Huang, H., Liu, Y., Niu, T.et al.Vector field path following for a micro flapping-wing robot.Sci. China Inf. Sci.67, 164201 (2024). https://doi.org/10.1007/s11432-023-4027-x
���ͣ����








������Ѷ
������Ƶ
��Ʒ����
 X
X

 ����֤��¼
����֤��¼
 QQ�˺ŵ�¼
QQ�˺ŵ�¼
 ���˺ŵ�¼
���˺ŵ�¼




















